Home /
Expert Answers /
Electrical Engineering /
pid-control-hw-1-in-this-model-j-moment-of-inertia-w-disturbance-torque-k-sensor-and-referen-pa178
(Solved): PID Control - HW#1 In this model: J= moment of inertia, W= disturbance torque, K= sensor and referen ...
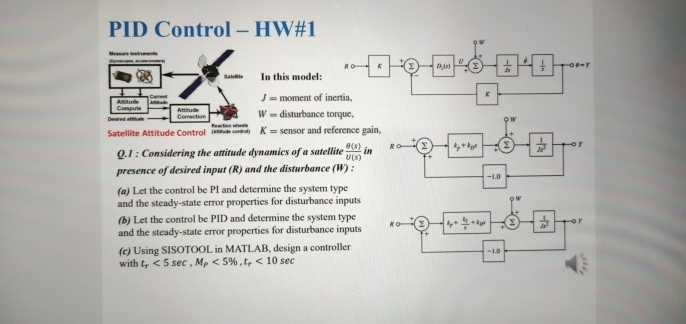
PID Control - HW#1 In this model:
J=moment of inertia,
W=disturbance torque,
K=sensor and reference gain, Q.I: Considering the attitude dynamics of a satellite
(\theta (s))/(U(s))in presence of desired input
(R)and the disturbance
(W): (a) Let the control be PI and determine the system type and the steady-state error properties for disturbance inputs (b) Let the control be PID and determine the system type and the steady-state error properties for disturbance inputs (c) Using SISOTOOL in MATLAB, design a controller with
t_(r)<5sec,M_(P)<5%,t_(r)<10sec