Home /
Expert Answers /
Mechanical Engineering /
design-a-pid-controller-for-the-mechanical-system-shown-in-figure-1-with-unit-step-input-what-are-pa550
(Solved): design a PID controller for the mechanical system shown in Figure 1 with unit-step input. What are ...
- design a PID controller for the mechanical system
shown in Figure 1 with unit-step input. What are the criteria used
for designing the PID controller. Why? Any
limitations?
- criteria: Rise Time, Settling time, Overshoot/Peak response, Steady-state error. Please use matlab to represent the answer. Thankyou!
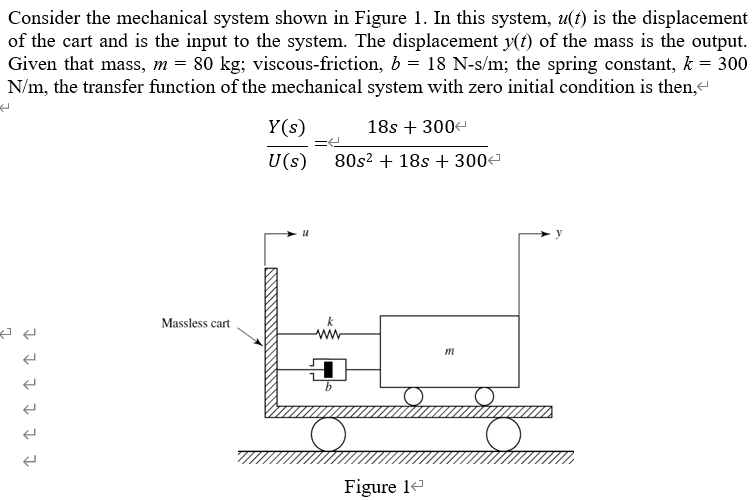
Consider the mechanical system shown in Figure 1. In this system, u(t) is the displacement of the cart and is the input to the system. The displacement y(t) of the mass is the output. Given that mass, m = 80 kg; viscous-friction, b = 18 N-s/m; the spring constant, k = 300 N/m, the transfer function of the mechanical system with zero initial condition is then, 4 18s + 300 U(S) 80s2 + 18s + 3004 Y(S) = Massless cart ?? ?? Î Î Î Î Î ? Figure 12