Home /
Expert Answers /
Electrical Engineering /
2-tune-a-pid-controller-for-the-following-second-order-process-gain-1-2-deadtime-2-0-pa840
(Solved): 2. Tune a PID controller for the following second-order process: Gain \( =1.2 \) Deadtime \( =2.0 \ ...
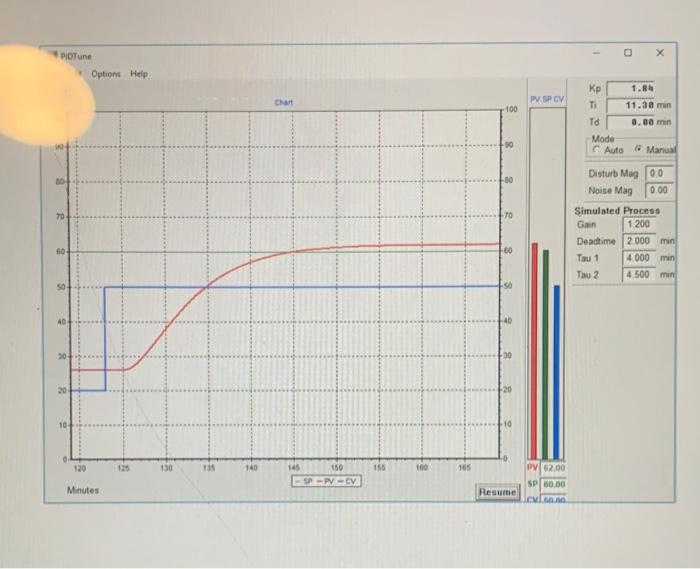
2. Tune a PID controller for the following second-order process: Gain \( =1.2 \) Deadtime \( =2.0 \) minutes First time constant \( =4.0 \) minutes Second time constant \( =4.5 \) minutes On the next page is a plot from which to determine: \( T_{1}, T_{2}, T_{3}, \Delta C V, \Delta P V, \theta_{0}, \tau \), and \( K \). The method is similar to the example on the Chapter 10 PowerPoint slides pages 10-45 to \( 10-48 \). Using the constants obtained above, find the PI controller parameters using the four open loop method: (Ziegler-Nichols, Cohen-Coon, Cohen-Coon with constraints, and Fertik). For the Fertik method, tune for a disturbance response.
Expert Answer
Answer. The Cohen-Coon with Constraints Issue 1: It tunes the loop for a quarter-amplitude-damping response, which overshoots and oscillates quite a b